Arduino on track

The first iteration is complete; TrackBot now moves under program control.
It's running a simple test program which turns left, turns right, then moves forward and back, stops, turns a led on and then repeats the cycle. More ambitious behaviour can wait until I have a proximity sensor working; strip-board is fragile and I don't want TrackBot to break itself by running into furniture or a wall.
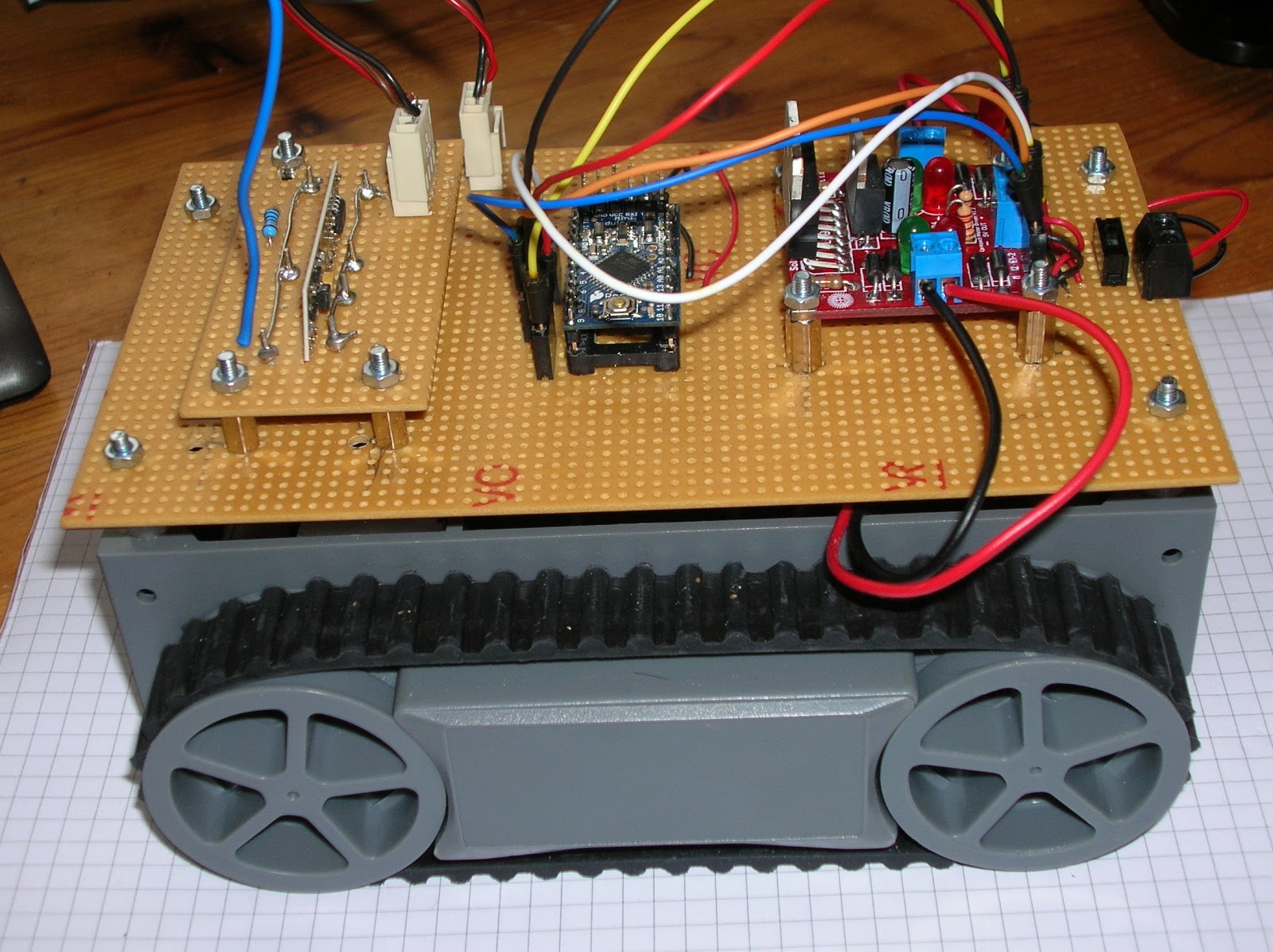 TrackBot is built from a Pololu RP5 base (now sadly discontinued by Pololu, but still available from Active Robots).
TrackBot is built from a Pololu RP5 base (now sadly discontinued by Pololu, but still available from Active Robots).The base is controlled by a Solarbotics L298 compact motor driver; that in turn is controlled by an Arduino Pro Mini 328 (5v/16MHz).
The next iteration will be to link up radio control. I've already mounted an old 433.9 MHz radio receiver, but it's not yet connected to the Arduino.
After that I'll add proximity sensing (using IR and Ultrasonics), and a compass. That's probably about as far as I want to go with the Arduino Pro; the Arduino platform is great for quick, simple prototyping but not so well suited to complex, concurrent processing.
The whole project is a first step towards B4 - the BeagleBoard based 'Bot. That will be based on the BeagleBoard xM or the recently-announced BeagleBone. It will probably contain an AVR as well, running some form of RTOS.



Comments
Post a Comment