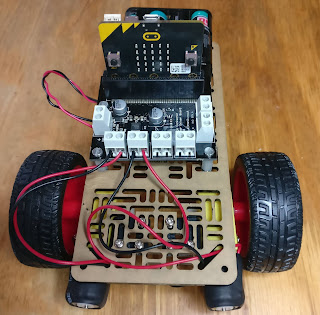
This afternoon I assembled a simple micro:bit mobile robot. It uses the Kitronik motor driver board and some Adafruit motors. I like the Kitronik board. It's easy to use, well documented, and the build quality is good. I'll be making some minor mods over the next couple of days. It needs a ToF Lidar sensor to make sure it doesn't bump into things and I plan to power it from a phone charger battery with an additional on-off switch. I'll use a second micro:bit to control it via radio. Update! There are now four articles in this series, and the robot has been named. It's called Anastasia. Here are the articles: 1. This introduction. 2. An short update when I released the initial code on GitHub . 3. A detailed walk-though of the controller code. 4. A detailed walk-through of the code that runs on the robot . Simple control code The test code I wrote to check the wiring was very simple. from microbit import * left = (pin16, pin0) right = (pi...